Добавляем к роботу сенсоров
Для того, чтобы робот мог объезжать препятствия, необходим специальный сенсор. Мы использовали ультразвуковой датчик расстояния. Под названием PING))) Ultrasonic Distance Sensor.

Принцип работы этого сенсора следующий: cенсор излучает короткий ультразвуковой импульс (в момент времени 0), который отражается от объекта и принимается сенсором. Расстояние рассчитывается исходя из времени до получения эха и скорости звука в воздухе.
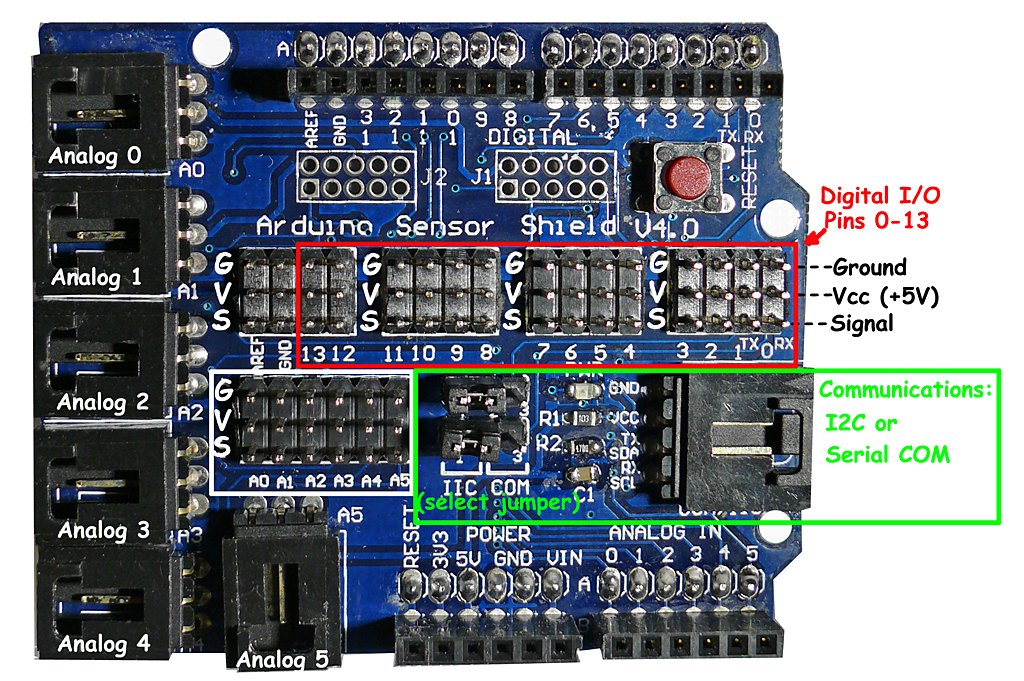
Для подключения сенсора к Arduino мы использовали расширение Sensor Shield:
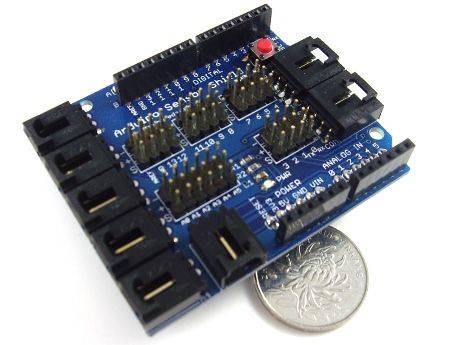
C помощью этого расширения очень удобно подключать к Arduino разные сенсоры и актуаторы (например сервомоторы). Кроме того, что на расширении есть все пины Arduino в обычном виде, как на самой плате, все они дополнительно выведены дополнительно и каждый пин дополнен двумя выводами питания «плюс» и «минус». Это позволят очень легко подключать сенсоры. Как правило все сенсоры имеют для подключения штекеры с тремя выводами «плюс»-«минус»-«сигнал»
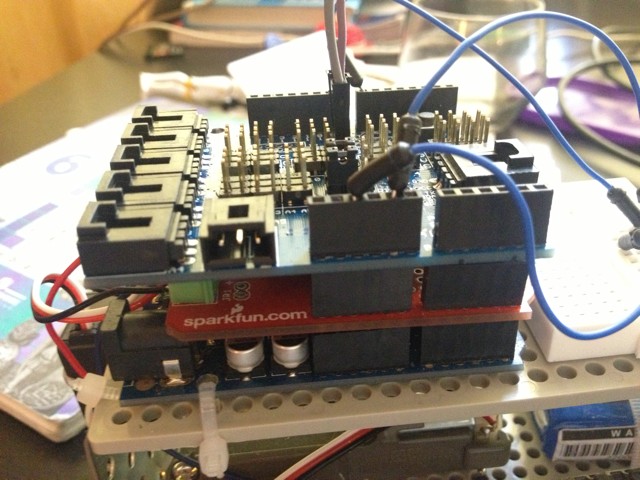
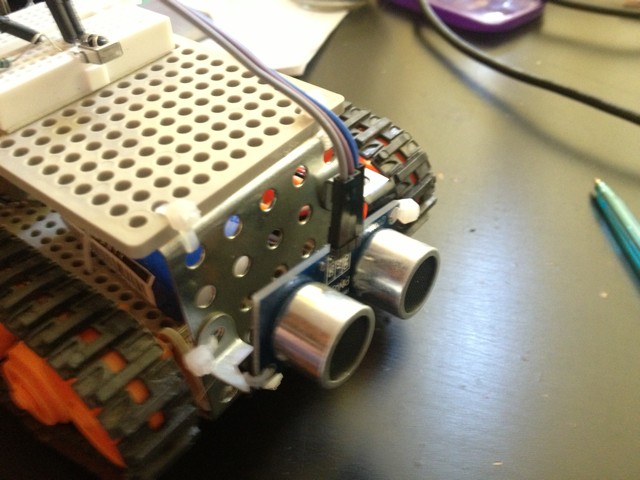
На этой фотографии видно, как мы подсоединили к одной группе контактов ультразвуковой сенсор. Сам сенсор мы неподвижно закрепили в передней части робота.
Первая задача, которую необходимо решить — объезжать препятствия, встречающиеся роботу на пути, объезжая их либо справа, либо слева (без какой-либо логики).
Для получения сигналов с сенсора мы использовали библиотеку NewPing. Если расстояние до препятствия 10 сантиметров или меньше, робот пытается объехать его слева. При этом остается возможность управлять роботом с пульта.
Программа:
#include <IRremote.h>
#include <ArduMoto.h>
#include <NewPing.h>
int pingpin=4; // Arduino pin tied to trigger pin on the ultrasonic sensor.
int maxdist=200 ;// Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(pingpin, pingpin, maxdist); // NewPing setup of pins and maximum distance.
ArduMoto Moto; //Object to work with motors
int RECV_PIN = 7; //Pin with IR sensor
IRrecv irrecv(RECV_PIN); //object to work with IR sensor
decode_results results; //object to work with results of IR sensor
const float kB=0.74 ; //коэффициент для мотора B, так как он крутится быстрее
const float kA=1;
const float kAll=0.7;//общий коэффициент
void setup()
{
//Serial.begin(9600);
irrecv.enableIRIn(); // подключаем ИК приемник
Moto.begin();//подключаем моторы
Moto.setSpeed('A',0);//останавливаем моторы на всякий случай
Moto.setSpeed('B',0);
}
void left(int velocity)
{
Moto.setSpeed('A',velocity*kAll*kA);
Moto.setSpeed('B',-velocity*kAll*kB);
}
void right(int velocity)
{
Moto.setSpeed('A',-velocity*kAll*kA);
Moto.setSpeed('B',velocity*kAll*kB);
}
void forward(int velocity)
{
Moto.setSpeed('A',velocity*kAll*kA);
Moto.setSpeed('B',velocity*kAll*kB);
}
void backward(int velocity)
{
Moto.setSpeed('A',-velocity*kAll*kA);
Moto.setSpeed('B',-velocity*kAll*kB);
}
void forwardleft(int velocity)
{
Moto.setSpeed('A',velocity*kAll*kA);
Moto.setSpeed('B',0.4*velocity*kAll*kB);
}
void forwardright(int velocity)
{
Moto.setSpeed('B',velocity*kAll*kB);
Moto.setSpeed('A',0.4*velocity*kAll*kA);
}
void backwardright(int velocity){
Moto.setSpeed('B',-velocity*kAll*kB);
Moto.setSpeed('A',-0.4*velocity*kAll*kA);
}
void backwardleft(int velocity){
Moto.setSpeed('A',-velocity*kAll*kA);
Moto.setSpeed('B',-0.4*velocity*kAll*kB);
}
void loop() {
int distcm;
distcm=sonar.ping_cm();//измеряем расстояние в см.
if( (distcm<=10)&&(distcm>0) ){//если до препятствия менее 10 см.
forward(0);
delay(50);
backward(100);
delay(100);
left(100);
delay(100);
forward(100);
}
if (irrecv.decode(&results)) {//если получили сигнал то надо что-то сделать
switch (results.value){
case 0x807fc03f://едем вперед
forward(100);
break;
case 0x807f40bf:
backward(100);
break;
case 0x807f9867:
forward(0);
break;
case 0x807f708f:
forwardleft(100);
break;
case 0x807f58a7:
forwardright(100);
break;
case 0x807f807f:
backwardright(100);
break;
case 0x807f06f9 :
backwardleft(100);
break;
case 0x807f906f :
left(100);
break;
case 0x807fb847 :
right(100);
break;
}
irrecv.resume();
}
}
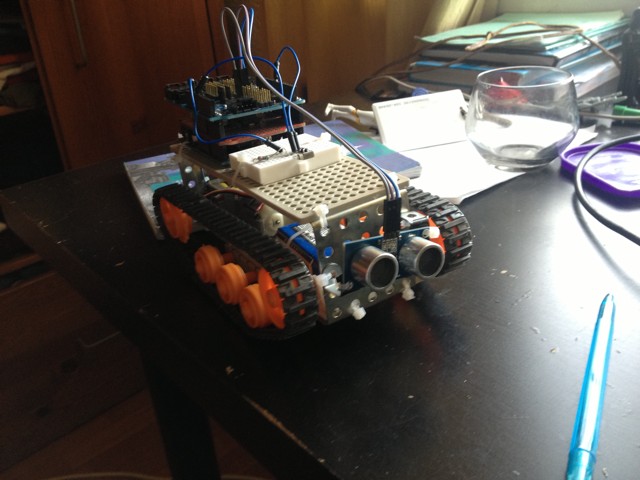
Теперь робот умеет объезжать препятствия:
Небольшая фотосессия на вкусное: