Строим робота
Мы строим робота.
Идея робота такая:
- Робот должен быть более-менее автономным;
- Необходима возможность дистанционного управления роботом (в идеале напрямую с телефона);
- Робот должен самостоятельно объезжать препятствия;
- Хочется иметь на борту видеокамеру, которая тоже должна дистанционно управляться и передавать изображение в режиме реального времени (хотя, опцию записи видео тоже можно предусмотреть);
- Изображение желательно получать также на телефон (но это, наверное, мечты).
Работы по созданию робота мы разделили на следующие этапы:
- Сборка движущего механизма.
- Установка «доп. оборудования» (сенсоры и актуаторы).
- Программирование микроконтроллера
- Программирование внешних устройств (телефона или компьютера) для управления роботом и получения и обработки информации, поступающей с сенсоров робота.
В процессе сборки и совершенствования робота пункты 2 и 3 будут выполнятся в цикле.
В принципе, можно купить уже готового робота или готовый комплект для сборки и программировать уже его. Но, во-первых, это не так интересно. Процесс проектирования и создания робота своими руками сам по себе затягивает. Во-вторых, при самостоятельном проектировании робота можно предусмотреть какие-то конструктивные особенности, чтобы робот удовлетворял потребностям его создателя. Правда, с точки зрения затрат, этот способ может выйти дороже.
Мы выбрали средний путь — узловая сборка, приобрели узлы и из них сделали робота. Решили делать гусеничного, поскольку проще в управлении, ну и «внедорожные» качества имеются. Для сборки использовали следующие компоненты:
- Редукторная коробка для двух моторов, и сами моторы. Tamiya Twin Motor Gearbox (TAM70097).


- Платформа для крепления и крепеж. — Tamiya Universal Plate Set (TAM70157).


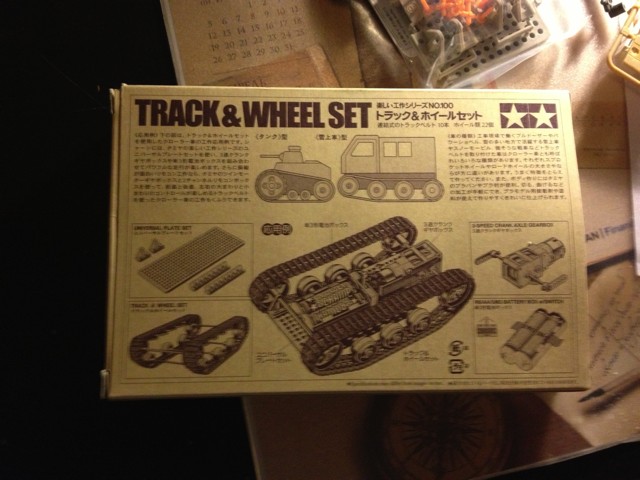
- Гусеницы и колеса с осями. — Tamiya Track and Wheel Set (TAM70100)


- Металлический конструктор.

Приступаем к сборке. Все узлы комплектуются очень подробными инструкция по сборке, написанные мелким японским шрифтом с картинками.
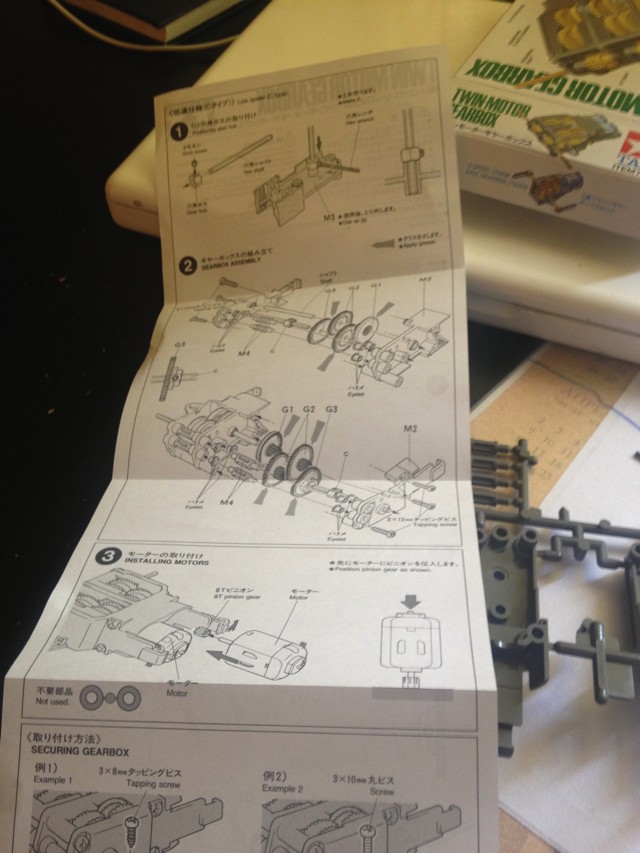
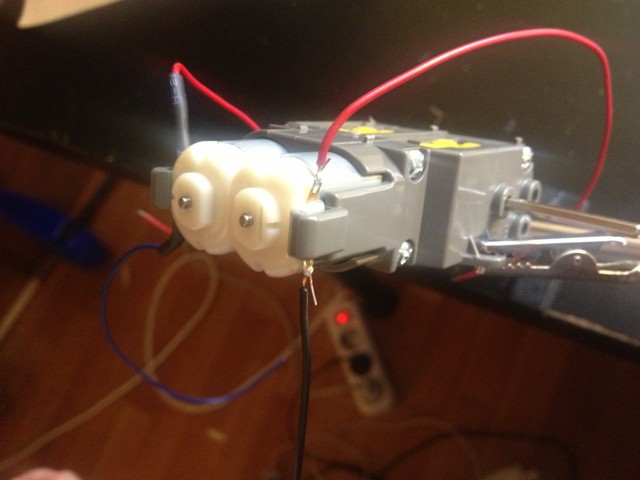
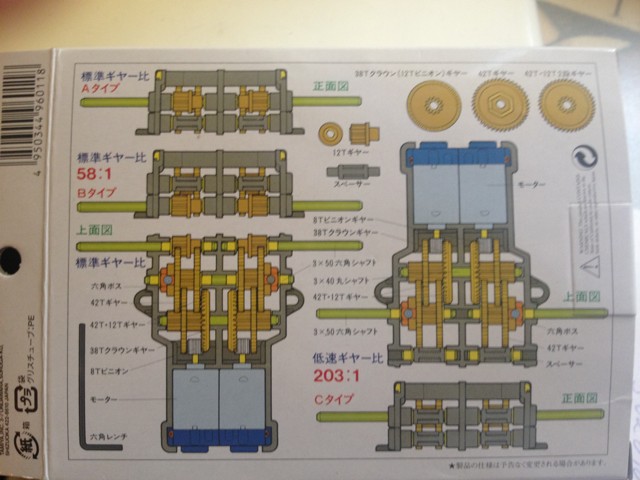
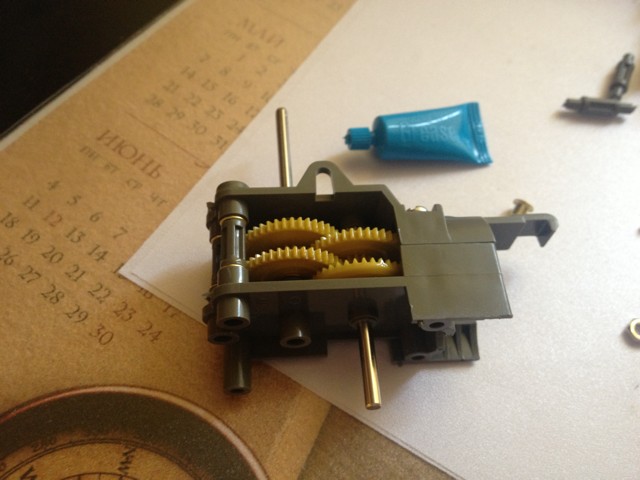
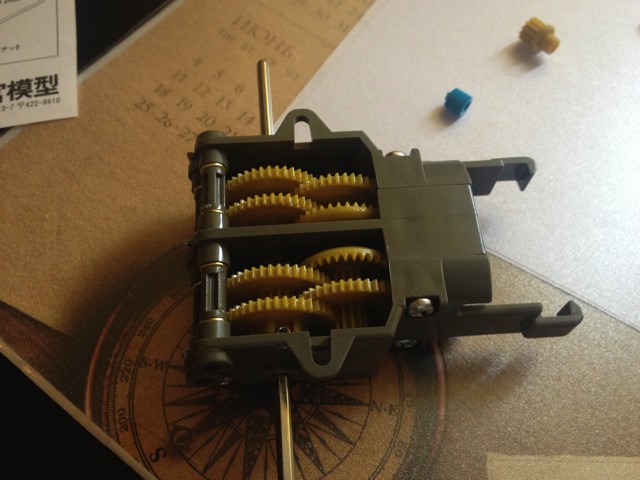
Редукторную коробку можно собрать с разным передаточным числом: 58:1 или 203:1. Мы собрали 203:1, чтобы нагрузка на моторы была меньше, да и с учетом груза, который мы хотим запихать в тележку, тяга у шасси должна быть побольше. Коробка состоит из двух симметричных блоков шестеренок.


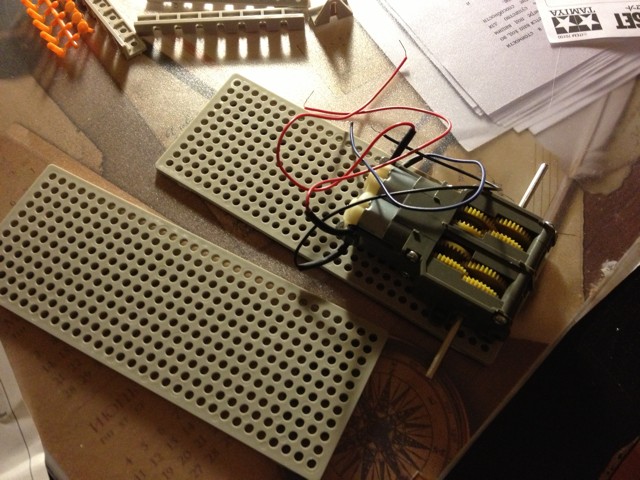
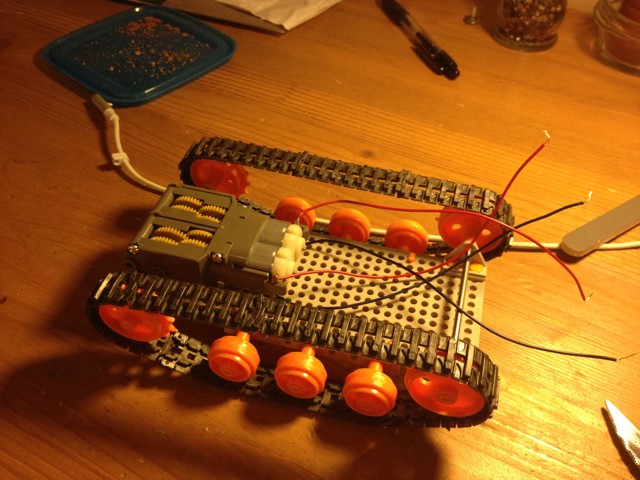
После сборки коробки в нее вставляются моторчики. К моторам надо не забыть припаять провода.


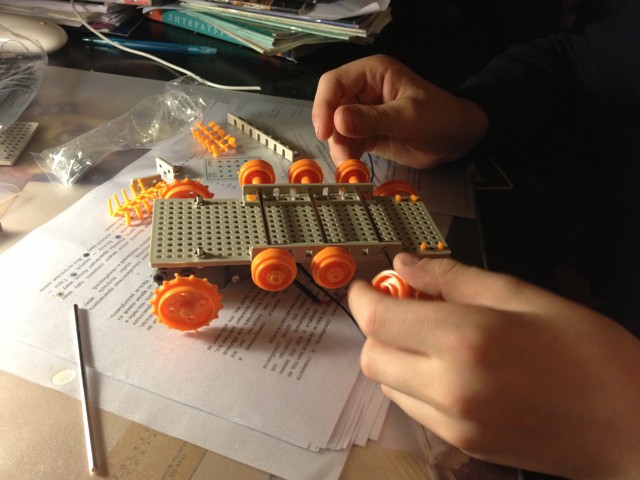
Блок устанавливается на платформу. После этого к валам, идущим от редуктора, крепятся ведущие колеса, остальные колеса крепятся на платформу.



После сборки подсоединили к проводам для проверки батарейку, использовали обычную крону на 9В — ездит.
На этом сборка шасси окончена, дальше будем собирать управляющие конструкции.
В процессе эксплуатации выяснилось, что моторы — это самое слабое звено этой конструкции. Пришлось несколько раз их разбирать для очистки нагара со счеток, в итоге, на одном из них щётки сгорели окончательно. Пришлось взять такой же из комплекта одномоторного редуктора (типа такого), который мы заказали про запас для более других экспериментов.


IMG_0321.jpg